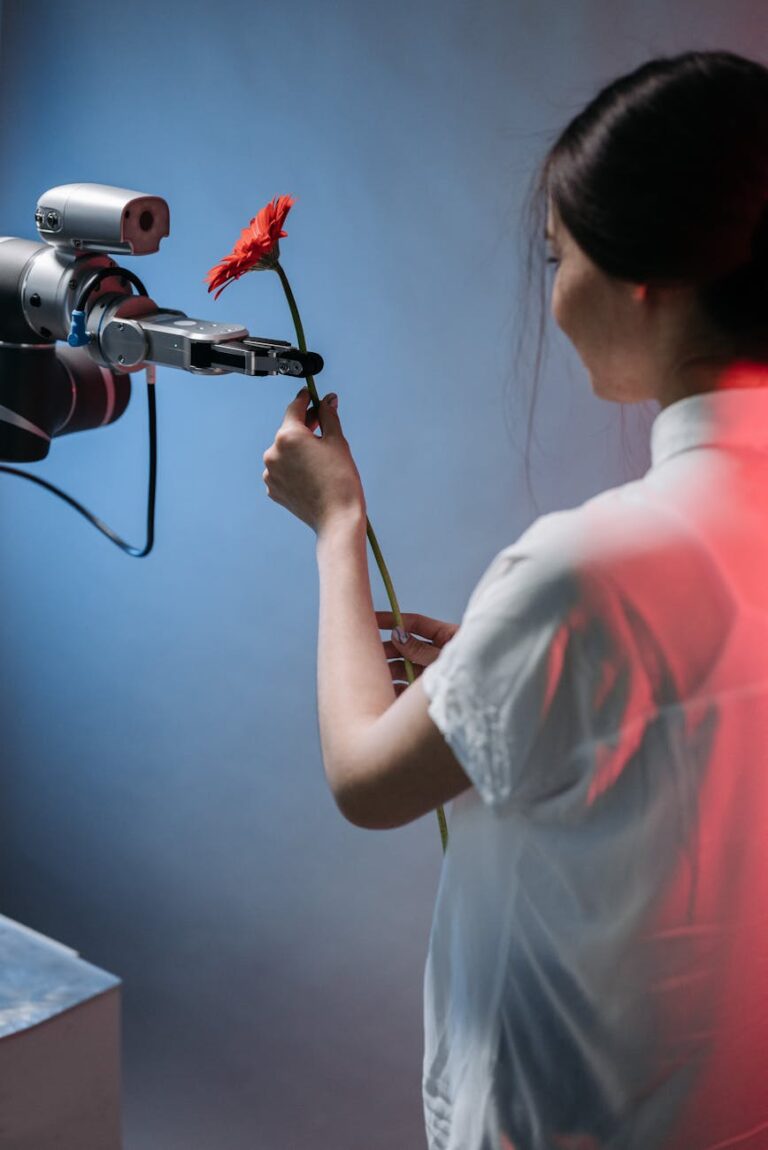
AI-Powered Robot: Stunning Resilience Against Chainsaw Attacks 3 min read Tech AI-Powered Robot: Stunning Resilience Against Chainsaw Attacks brainybrat_bot September 27, 2025 AI-powered robots are setting new standards with their stunning resilience against chainsaw attacks, combining smart design and... Read More Read more about AI-Powered Robot: Stunning Resilience Against Chainsaw Attacks